


- Joined
- Jun 12, 2018
- Messages
- 122
Hey David,
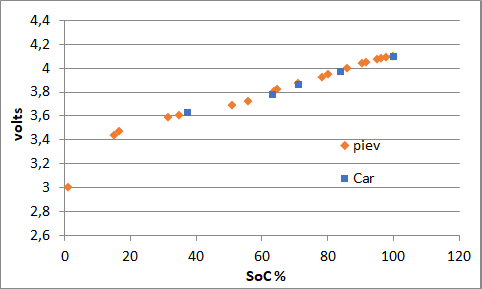
After my latest test drive I am wondering why we cut off the SoC volts table at 3.54912?
If volts = 3.053819 then SoC = 0 is this where NMC chemistry = 0? I thought it went to 2.75V.
In addition the car stops at 10% SoC.
So with the equation SoC = 12.096*volts -36.939, when volts meets the condition of < 3.54912 we are at 5.397% SoC.
I don't want to stop the discharge at 3.54912 volts which is what is happening.
In fact, doing the math now.... we go below 10% at 3.61536 Volts in the previous equation.
I think 3.6 volts is well above 10% SoC, am I wrong? I think 3.6 volts is over 50% SoC.
i think we should hit 10% around 3.4 Volts.
After my latest test drive I am wondering why we cut off the SoC volts table at 3.54912?
If volts = 3.053819 then SoC = 0 is this where NMC chemistry = 0? I thought it went to 2.75V.
In addition the car stops at 10% SoC.
So with the equation SoC = 12.096*volts -36.939, when volts meets the condition of < 3.54912 we are at 5.397% SoC.
I don't want to stop the discharge at 3.54912 volts which is what is happening.
In fact, doing the math now.... we go below 10% at 3.61536 Volts in the previous equation.
I think 3.6 volts is well above 10% SoC, am I wrong? I think 3.6 volts is over 50% SoC.
i think we should hit 10% around 3.4 Volts.


 ] Fabulous result that will extend the life and range of the little jellybean.
] Fabulous result that will extend the life and range of the little jellybean.
